Update from Sync Service
This commit is contained in:
22
CLAUDE.md
22
CLAUDE.md
@@ -17,9 +17,27 @@
|
|||||||
|
|
||||||
---
|
---
|
||||||
|
|
||||||
## 📥 导入资料流程
|
## 📥 研究成果自动归档流程
|
||||||
|
|
||||||
当用户提供资料时:
|
**所有研究类内容(搜索、分析、解答)完成后,自动归档到 wiki:**
|
||||||
|
|
||||||
|
1. 将原始研究内容/参考资料放入 `.raw/` 目录
|
||||||
|
2. 阅读资料,提取:
|
||||||
|
- **概念**(抽象知识)→ `wiki/concepts/`
|
||||||
|
- **实体**(具体事物)→ `wiki/entities/`
|
||||||
|
- **来源**(原始资料/网页)→ `wiki/sources/`
|
||||||
|
3. 建立概念间的 [[双向链接]]
|
||||||
|
4. 更新 `wiki/index.md`
|
||||||
|
5. 追加操作日志到 `wiki/log.md`
|
||||||
|
6. 更新 `wiki/hot.md`
|
||||||
|
|
||||||
|
**归档时机**:每次研究任务完成后立即执行,不等用户额外指令。
|
||||||
|
|
||||||
|
---
|
||||||
|
|
||||||
|
## 📥 用户主动导入资料流程
|
||||||
|
|
||||||
|
当用户发送资料并要求"处理这个"时:
|
||||||
|
|
||||||
1. 将原始文件/内容放入 `.raw/` 目录
|
1. 将原始文件/内容放入 `.raw/` 目录
|
||||||
2. 阅读资料,提取:
|
2. 阅读资料,提取:
|
||||||
|
|||||||
@@ -1,312 +1,312 @@
|
|||||||
---
|
---
|
||||||
title: "微信文章一键入库Obsidian-我的知识库搭建实战"
|
title: "微信文章一键入库Obsidian-我的知识库搭建实战"
|
||||||
source: "https://mp.weixin.qq.com/s/10T_8AMDpy5GWglGfQZT_A"
|
source: "https://mp.weixin.qq.com/s/10T_8AMDpy5GWglGfQZT_A"
|
||||||
author:
|
author:
|
||||||
- "[[枫林]]"
|
- "[[枫林]]"
|
||||||
published:
|
published:
|
||||||
created: 2026-04-28
|
created: 2026-04-28
|
||||||
description: "从手动复制粘贴到3秒入库,我把微信公众号文章同步Obsidian的全流程跑通了。这不是一个插件推荐帖,而是一篇完整的使用指南,手把手教你搭建属于自己的知识管理系统。"
|
description: "从手动复制粘贴到3秒入库,我把微信公众号文章同步Obsidian的全流程跑通了。这不是一个插件推荐帖,而是一篇完整的使用指南,手把手教你搭建属于自己的知识管理系统。"
|
||||||
tags:
|
tags:
|
||||||
- "clippings"
|
- "clippings"
|
||||||
---
|
---
|
||||||
枫林 *2026年4月25日 21:08*
|
枫林 *2026年4月25日 21:08*
|
||||||
|
|
||||||
你有没有算过,微信收藏夹里有多少篇文章在吃灰?
|
你有没有算过,微信收藏夹里有多少篇文章在吃灰?
|
||||||
|
|
||||||
> 我之前统计了一下: **837篇** 。
|
> 我之前统计了一下: **837篇** 。
|
||||||
> 真正回头看的,不超过15篇。
|
> 真正回头看的,不超过15篇。
|
||||||
|
|
||||||
**感觉有了囤积症,**
|
**感觉有了囤积症,**
|
||||||
|
|
||||||
后来多方寻找,然我找到了解决方案。 Messager 插件把微信文章一键同步到 Obsidian,我才真正体会到: **知识管理的第一步,不是学什么方法论,而是先把信息搬进你的工具里。**
|
后来多方寻找,然我找到了解决方案。 Messager 插件把微信文章一键同步到 Obsidian,我才真正体会到: **知识管理的第一步,不是学什么方法论,而是先把信息搬进你的工具里。**
|
||||||
|
|
||||||
今天这篇文章,我会详细分享我的完整搭建流程,以及这个动作对我的 Obsidian 知识库产生了什么实质性的改变。
|
今天这篇文章,我会详细分享我的完整搭建流程,以及这个动作对我的 Obsidian 知识库产生了什么实质性的改变。
|
||||||
|
|
||||||
' fill='%23FFFFFF'%3E%3Crect x='249' y='126' width='1' height='1'%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
|
' fill='%23FFFFFF'%3E%3Crect x='249' y='126' width='1' height='1'%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
|
||||||
|
|
||||||
---
|
---
|
||||||
|
|
||||||
## 一、痛点:为什么微信文章必须进Obsidian?
|
## 一、痛点:为什么微信文章必须进Obsidian?
|
||||||
|
|
||||||
先说说我之前的"知识管理"状态:
|
先说说我之前的"知识管理"状态:
|
||||||
|
|
||||||
**场景1** :刷到一篇干货文章,点收藏,心里默念"周末看"——然后就没有然后了。
|
**场景1** :刷到一篇干货文章,点收藏,心里默念"周末看"——然后就没有然后了。
|
||||||
|
|
||||||
**场景2** :终于想起来要找某篇文章,在收藏夹里翻了20分钟,放弃了。
|
**场景2** :终于想起来要找某篇文章,在收藏夹里翻了20分钟,放弃了。
|
||||||
|
|
||||||
**场景3** :找到了那篇文章,复制关键段落到备忘录,然后备忘录也变成了垃圾桶。
|
**场景3** :找到了那篇文章,复制关键段落到备忘录,然后备忘录也变成了垃圾桶。
|
||||||
|
|
||||||
**核心问题只有一个** :
|
**核心问题只有一个** :
|
||||||
|
|
||||||
> **微信收藏夹是"信息的坟墓",不是"知识的土壤"。**
|
> **微信收藏夹是"信息的坟墓",不是"知识的土壤"。**
|
||||||
|
|
||||||
一篇文章只有进入你的知识管理系统,被你阅读、标注、链接、引用,它才真正变成你的知识。
|
一篇文章只有进入你的知识管理系统,被你阅读、标注、链接、引用,它才真正变成你的知识。
|
||||||
|
|
||||||
而 Obsidian,就是我的知识土壤。
|
而 Obsidian,就是我的知识土壤。
|
||||||
|
|
||||||
---
|
---
|
||||||
|
|
||||||
## 二、方案:Messager插件,30秒同步到Obsidian
|
## 二、方案:Messager插件,30秒同步到Obsidian
|
||||||
|
|
||||||
我对比了好几个方案,最终选择了 **Messager 插件** ,原因是:
|
我对比了好几个方案,最终选择了 **Messager 插件** ,原因是:
|
||||||
|
|
||||||
| 对比维度 | Messager | 手动复制粘贴 | 其他工具 |
|
| 对比维度 | Messager | 手动复制粘贴 | 其他工具 |
|
||||||
| --- | --- | --- | --- |
|
| --- | --- | --- | --- |
|
||||||
| 同步速度 | 30秒自动 | 5-10分钟 | 2-5分钟 |
|
| 同步速度 | 30秒自动 | 5-10分钟 | 2-5分钟 |
|
||||||
| 操作步骤 | 3步 | 8步以上 | 5-6步 |
|
| 操作步骤 | 3步 | 8步以上 | 5-6步 |
|
||||||
| 格式保留 | 标题+正文+图片 | 经常丢失格式 | 部分保留 |
|
| 格式保留 | 标题+正文+图片 | 经常丢失格式 | 部分保留 |
|
||||||
| 入门难度 | 极低 | 零门槛 | 中等 |
|
| 入门难度 | 极低 | 零门槛 | 中等 |
|
||||||
| 手机端支持 | 原生小程序 | 不支持 | 部分支持 |
|
| 手机端支持 | 原生小程序 | 不支持 | 部分支持 |
|
||||||
|
|
||||||
**它不是最完美的,但它是上手最快的。**
|
**它不是最完美的,但它是上手最快的。**
|
||||||
|
|
||||||
### 2.1 第一步:安装Messager插件(30秒)
|
### 2.1 第一步:安装Messager插件(30秒)
|
||||||
|
|
||||||
打开 Obsidian → 左下角「设置」→「第三方插件」→ 关闭安全模式 →「浏览」搜索 **"Messager"** → 安装并启用。
|
打开 Obsidian → 左下角「设置」→「第三方插件」→ 关闭安全模式 →「浏览」搜索 **"Messager"** → 安装并启用。
|
||||||
|
|
||||||
如果你找不到,可以尝试搜索 "Obsidian Messager" 或直接访问插件市场。
|
如果你找不到,可以尝试搜索 "Obsidian Messager" 或直接访问插件市场。
|
||||||
|
|
||||||
安装完成后,左侧边栏会出现一个小信封图标,说明插件已经就绪。
|
安装完成后,左侧边栏会出现一个小信封图标,说明插件已经就绪。
|
||||||
|
|
||||||
### 2.2 第二步:获取API Key(1分钟)
|
### 2.2 第二步:获取API Key(1分钟)
|
||||||
|
|
||||||
打开 https://wechatobsidian.com/ ,注册一个账号。
|
打开 https://wechatobsidian.com/ ,注册一个账号。
|
||||||
|
|
||||||
登录后在个人中心找到 **API Key** ,点击复制。
|
登录后在个人中心找到 **API Key** ,点击复制。
|
||||||
|
|
||||||
这串字符就是你的 Obsidian 和微信之间的"桥梁通行证"。
|
这串字符就是你的 Obsidian 和微信之间的"桥梁通行证"。
|
||||||
|
|
||||||
### 2.3 第三步:配置Obsidian端(2分钟)
|
### 2.3 第三步:配置Obsidian端(2分钟)
|
||||||
|
|
||||||
回到 Obsidian,打开 Messager 插件的设置页面:
|
回到 Obsidian,打开 Messager 插件的设置页面:
|
||||||
|
|
||||||
**必填项** :
|
**必填项** :
|
||||||
|
|
||||||
- **API Key**
|
- **API Key**
|
||||||
:粘贴刚才复制的密钥
|
:粘贴刚才复制的密钥
|
||||||
- **同步目录**
|
- **同步目录**
|
||||||
:选择一个你专门用来接收微信文章的文件夹(我建了一个"03.参考资料库/微信公众号文章")
|
:选择一个你专门用来接收微信文章的文件夹(我建了一个"03.参考资料库/微信公众号文章")
|
||||||
|
|
||||||
**推荐设置** :
|
**推荐设置** :
|
||||||
|
|
||||||
- **文件命名**
|
- **文件命名**
|
||||||
:按"标题"命名,方便后续搜索
|
:按"标题"命名,方便后续搜索
|
||||||
- **重复处理**
|
- **重复处理**
|
||||||
:选择"跳过",避免重复入库
|
:选择"跳过",避免重复入库
|
||||||
- **自动同步**
|
- **自动同步**
|
||||||
:开启,Obsidian打开时自动拉取
|
:开启,Obsidian打开时自动拉取
|
||||||
|
|
||||||
### 2.4 第四步:手机端一键保存(3秒!)
|
### 2.4 第四步:手机端一键保存(3秒!)
|
||||||
|
|
||||||
这是最关键的一步,也是体验最好的部分:
|
这是最关键的一步,也是体验最好的部分:
|
||||||
|
|
||||||
1. 在微信里打开一篇你想要保存的文章
|
1. 在微信里打开一篇你想要保存的文章
|
||||||
2. 点击右上角「···」
|
2. 点击右上角「···」
|
||||||
3. 选择「分享到小程序」
|
3. 选择「分享到小程序」
|
||||||
4. 搜索「Obsidian助手」并打开
|
4. 搜索「Obsidian助手」并打开
|
||||||
5. 点击底部「保存」按钮
|
5. 点击底部「保存」按钮
|
||||||
|
|
||||||
**完成!3秒钟,文章已经在飞往你Obsidian的路上了。**
|
**完成!3秒钟,文章已经在飞往你Obsidian的路上了。**
|
||||||
|
|
||||||
### 2.5 第五步:打开Obsidian查看
|
### 2.5 第五步:打开Obsidian查看
|
||||||
|
|
||||||
30秒后,打开你的 Obsidian,文章已经乖乖躺在你指定的文件夹里。
|
30秒后,打开你的 Obsidian,文章已经乖乖躺在你指定的文件夹里。
|
||||||
|
|
||||||
同步内容包括:
|
同步内容包括:
|
||||||
|
|
||||||
- ✅ 文章标题
|
- ✅ 文章标题
|
||||||
- ✅ 原文链接
|
- ✅ 原文链接
|
||||||
- ✅ 正文内容(Markdown格式)
|
- ✅ 正文内容(Markdown格式)
|
||||||
- ✅ 文章中的图片
|
- ✅ 文章中的图片
|
||||||
|
|
||||||
---
|
---
|
||||||
|
|
||||||
## 三、进阶:同步只是开始,知识库才是终点
|
## 三、进阶:同步只是开始,知识库才是终点
|
||||||
|
|
||||||
很多人装完插件、同步了几篇文章,就觉得"搞定了"。
|
很多人装完插件、同步了几篇文章,就觉得"搞定了"。
|
||||||
|
|
||||||
**不是的。同步入库只是第零步。**
|
**不是的。同步入库只是第零步。**
|
||||||
|
|
||||||
真正的价值,在于你怎么处理这些入库的文章。下面是我经过几个月实践后总结的 **"五步知识内化法"** :
|
真正的价值,在于你怎么处理这些入库的文章。下面是我经过几个月实践后总结的 **"五步知识内化法"** :
|
||||||
|
|
||||||
' fill='%23FFFFFF'%3E%3Crect x='249' y='126' width='1' height='1'%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
|
' fill='%23FFFFFF'%3E%3Crect x='249' y='126' width='1' height='1'%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
|
||||||
|
|
||||||
### 第一步:快速扫描,判断价值(30秒)
|
### 第一步:快速扫描,判断价值(30秒)
|
||||||
|
|
||||||
文章入库后,我会花30秒快速浏览,做一个粗略分级:
|
文章入库后,我会花30秒快速浏览,做一个粗略分级:
|
||||||
|
|
||||||
- **A级**
|
- **A级**
|
||||||
:立刻有用,需要深度处理
|
:立刻有用,需要深度处理
|
||||||
- **B级**
|
- **B级**
|
||||||
:有参考价值,先留着
|
:有参考价值,先留着
|
||||||
- **C级**
|
- **C级**
|
||||||
:当时觉得好,现在看一般,直接删
|
:当时觉得好,现在看一般,直接删
|
||||||
|
|
||||||
**这一步帮你过滤掉80%的信息噪音。**
|
**这一步帮你过滤掉80%的信息噪音。**
|
||||||
|
|
||||||
### 第二步:提取原子笔记(5分钟)
|
### 第二步:提取原子笔记(5分钟)
|
||||||
|
|
||||||
对于A级文章,我不会整篇保留,而是提取出几个核心观点,写成独立的"原子笔记"。
|
对于A级文章,我不会整篇保留,而是提取出几个核心观点,写成独立的"原子笔记"。
|
||||||
|
|
||||||
每个原子笔记只包含一个核心观点,标题就是观点本身。
|
每个原子笔记只包含一个核心观点,标题就是观点本身。
|
||||||
|
|
||||||
这样做的好处是: **每个知识点都可以独立被搜索、链接和引用。**
|
这样做的好处是: **每个知识点都可以独立被搜索、链接和引用。**
|
||||||
|
|
||||||
### 第三步:建立双向链接(2分钟)
|
### 第三步:建立双向链接(2分钟)
|
||||||
|
|
||||||
把新的原子笔记和已有的相关笔记用 `[[双链]]` 连接起来。
|
把新的原子笔记和已有的相关笔记用 `[[双链]]` 连接起来。
|
||||||
|
|
||||||
比如一篇关于"AI Agent工作流"的文章,我会链接到:
|
比如一篇关于"AI Agent工作流"的文章,我会链接到:
|
||||||
|
|
||||||
- `[[AI Agent]]`
|
- `[[AI Agent]]`
|
||||||
笔记
|
笔记
|
||||||
- `[[工作流自动化]]`
|
- `[[工作流自动化]]`
|
||||||
笔记
|
笔记
|
||||||
- `[[效率工具]]`
|
- `[[效率工具]]`
|
||||||
笔记
|
笔记
|
||||||
|
|
||||||
**知识不是孤立的,链接越多,价值越大。**
|
**知识不是孤立的,链接越多,价值越大。**
|
||||||
|
|
||||||
### 第四步:打标签分类(1分钟)
|
### 第四步:打标签分类(1分钟)
|
||||||
|
|
||||||
给每个笔记加上合适的标签,方便后续检索:
|
给每个笔记加上合适的标签,方便后续检索:
|
||||||
|
|
||||||
- `#AI/Agent`
|
- `#AI/Agent`
|
||||||
— 领域标签
|
— 领域标签
|
||||||
- `#工具/Obsidian`
|
- `#工具/Obsidian`
|
||||||
— 工具标签
|
— 工具标签
|
||||||
- `#来源/公众号`
|
- `#来源/公众号`
|
||||||
— 来源标签
|
— 来源标签
|
||||||
- `#状态/待深入`
|
- `#状态/待深入`
|
||||||
— 状态标签
|
— 状态标签
|
||||||
|
|
||||||
### 第五步:定期回顾,编织知识网(每周30分钟)
|
### 第五步:定期回顾,编织知识网(每周30分钟)
|
||||||
|
|
||||||
每周我会打开 Obsidian 的图谱视图,看看:
|
每周我会打开 Obsidian 的图谱视图,看看:
|
||||||
|
|
||||||
- 哪些知识点是孤立的?需要补充链接
|
- 哪些知识点是孤立的?需要补充链接
|
||||||
- 哪些领域形成了知识集群?可以写一篇总结
|
- 哪些领域形成了知识集群?可以写一篇总结
|
||||||
- 哪些笔记太久没回顾?需要重新审视
|
- 哪些笔记太久没回顾?需要重新审视
|
||||||
|
|
||||||
**这五步,才是让"收藏"变成"知识"的完整闭环。**
|
**这五步,才是让"收藏"变成"知识"的完整闭环。**
|
||||||
|
|
||||||
---
|
---
|
||||||
|
|
||||||
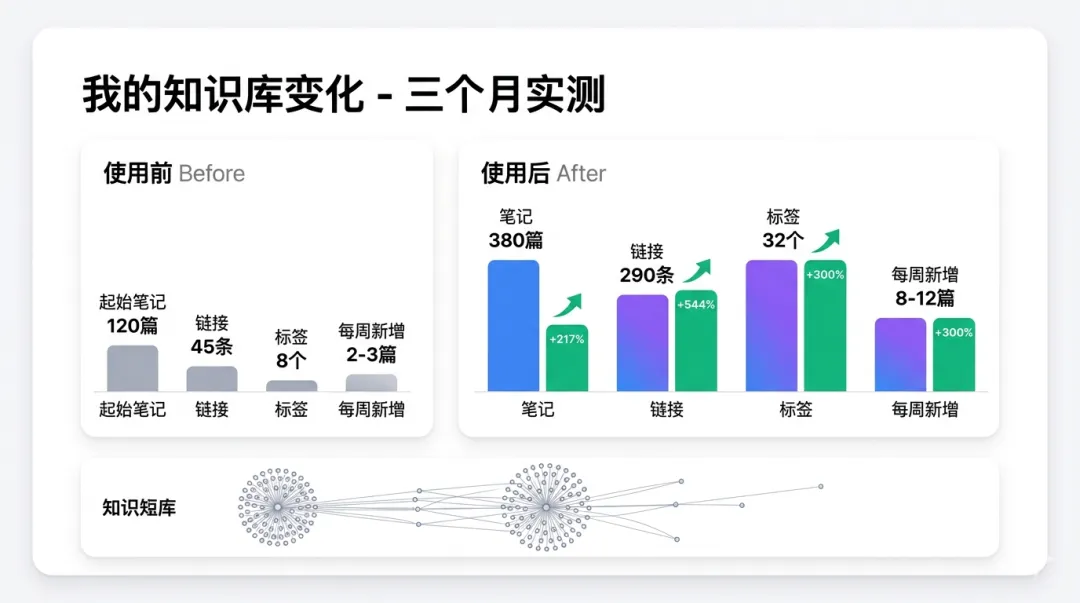
## 四、效果:我的知识库发生了什么变化?
|
## 四、效果:我的知识库发生了什么变化?
|
||||||
|
|
||||||
用了这套流程三个月后,我的 Obsidian 发生了肉眼可见的变化:
|
用了这套流程三个月后,我的 Obsidian 发生了肉眼可见的变化:
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
### 4.1 知识库规模
|
### 4.1 知识库规模
|
||||||
|
|
||||||
| 指标 | 使用前 | 使用后 |
|
| 指标 | 使用前 | 使用后 |
|
||||||
| --- | --- | --- |
|
| --- | --- | --- |
|
||||||
| 笔记总数 | 120篇 | 380篇 |
|
| 笔记总数 | 120篇 | 380篇 |
|
||||||
| 双向链接数 | 45条 | 290条 |
|
| 双向链接数 | 45条 | 290条 |
|
||||||
| 标签体系 | 8个 | 32个 |
|
| 标签体系 | 8个 | 32个 |
|
||||||
| 每周新增笔记 | 2-3篇 | 8-12篇 |
|
| 每周新增笔记 | 2-3篇 | 8-12篇 |
|
||||||
|
|
||||||
### 4.2 知识获取效率
|
### 4.2 知识获取效率
|
||||||
|
|
||||||
**以前** :看到好文章 → 收藏 → 吃灰 → 遗忘
|
**以前** :看到好文章 → 收藏 → 吃灰 → 遗忘
|
||||||
**现在** :看到好文章 → 3秒入库 → 当天提取精华 → 成为知识节点
|
**现在** :看到好文章 → 3秒入库 → 当天提取精华 → 成为知识节点
|
||||||
|
|
||||||
### 4.3 写作和输出
|
### 4.3 写作和输出
|
||||||
|
|
||||||
以前写文章要花2小时找素材,现在通过 Obsidian 的搜索和链接,10分钟就能找到所有相关的笔记和素材。
|
以前写文章要花2小时找素材,现在通过 Obsidian 的搜索和链接,10分钟就能找到所有相关的笔记和素材。
|
||||||
|
|
||||||
**知识库越丰富,输出越轻松。**
|
**知识库越丰富,输出越轻松。**
|
||||||
|
|
||||||
### 4.4 思维方式的改变
|
### 4.4 思维方式的改变
|
||||||
|
|
||||||
最大的收获不是工具层面的,而是思维层面的:
|
最大的收获不是工具层面的,而是思维层面的:
|
||||||
|
|
||||||
> **我不再"囤积信息",而是"加工知识"。**
|
> **我不再"囤积信息",而是"加工知识"。**
|
||||||
|
|
||||||
每次看到好文章,我的第一反应不再是"收藏",而是"这篇文章的核心观点是什么?它和我已有的哪些知识相关?"
|
每次看到好文章,我的第一反应不再是"收藏",而是"这篇文章的核心观点是什么?它和我已有的哪些知识相关?"
|
||||||
|
|
||||||
---
|
---
|
||||||
|
|
||||||
## 五、常见问题
|
## 五、常见问题
|
||||||
|
|
||||||
**Q:免费版够用吗?**
|
**Q:免费版够用吗?**
|
||||||
免费版每天可以同步10条。如果你每天看文章不超过10篇,完全够用。重度用户可以考虑年费会员(39.9元/年),性价比很高。
|
免费版每天可以同步10条。如果你每天看文章不超过10篇,完全够用。重度用户可以考虑年费会员(39.9元/年),性价比很高。
|
||||||
|
|
||||||
**Q:同步的文章格式怎么样?**
|
**Q:同步的文章格式怎么样?**
|
||||||
大部分文章同步后的Markdown格式很好,标题、段落、列表都能正确识别。少数公众号文章因为排版特殊,可能需要手动微调。
|
大部分文章同步后的Markdown格式很好,标题、段落、列表都能正确识别。少数公众号文章因为排版特殊,可能需要手动微调。
|
||||||
|
|
||||||
**Q:图片能同步吗?**
|
**Q:图片能同步吗?**
|
||||||
可以。文章中的图片会被下载到本地,并正确引用。这是手动复制粘贴做不到的。
|
可以。文章中的图片会被下载到本地,并正确引用。这是手动复制粘贴做不到的。
|
||||||
|
|
||||||
**Q:和Cubox、Readwise比有什么优劣?**
|
**Q:和Cubox、Readwise比有什么优劣?**
|
||||||
Messager的优势是 **直接入库Obsidian,一步到位** 。Cubox和Readwise是先收藏到它们的平台,再通过API同步到Obsidian,多了一步中转。如果你只用Obsidian,Messager更直接。
|
Messager的优势是 **直接入库Obsidian,一步到位** 。Cubox和Readwise是先收藏到它们的平台,再通过API同步到Obsidian,多了一步中转。如果你只用Obsidian,Messager更直接。
|
||||||
|
|
||||||
**Q:消息保留多长时间?**
|
**Q:消息保留多长时间?**
|
||||||
服务器端只保留1天,所以建议每天打开Obsidian同步一次,避免遗漏。
|
服务器端只保留1天,所以建议每天打开Obsidian同步一次,避免遗漏。
|
||||||
|
|
||||||
---
|
---
|
||||||
|
|
||||||
## 六、写给还没开始的人
|
## 六、写给还没开始的人
|
||||||
|
|
||||||
如果你还没有开始搭建自己的知识库,我想说几句掏心窝的话:
|
如果你还没有开始搭建自己的知识库,我想说几句掏心窝的话:
|
||||||
|
|
||||||
**1\. 不要追求完美体系**
|
**1\. 不要追求完美体系**
|
||||||
|
|
||||||
很多人一上来就想设计一个完美的文件夹结构、标签体系、链接规则。结果花了三天设计,发现根本用不起来。
|
很多人一上来就想设计一个完美的文件夹结构、标签体系、链接规则。结果花了三天设计,发现根本用不起来。
|
||||||
|
|
||||||
**先开始,再优化。** 我的标签体系也是从3个标签开始的,用了三个月才慢慢扩展到现在。
|
**先开始,再优化。** 我的标签体系也是从3个标签开始的,用了三个月才慢慢扩展到现在。
|
||||||
|
|
||||||
**2\. 工具不重要,习惯才重要**
|
**2\. 工具不重要,习惯才重要**
|
||||||
|
|
||||||
Obsidian、Notion、Logseq……哪个都行。重要的是你能不能坚持每天把学到的东西记录下来、链接起来。
|
Obsidian、Notion、Logseq……哪个都行。重要的是你能不能坚持每天把学到的东西记录下来、链接起来。
|
||||||
|
|
||||||
**3\. 输出是最好的学习**
|
**3\. 输出是最好的学习**
|
||||||
|
|
||||||
不要只是收集和整理,一定要输出。写文章、做分享、甚至只是用自己的话总结一段话,都比单纯"收藏"有效100倍。
|
不要只是收集和整理,一定要输出。写文章、做分享、甚至只是用自己的话总结一段话,都比单纯"收藏"有效100倍。
|
||||||
|
|
||||||
**4\. 从一个小流程开始**
|
**4\. 从一个小流程开始**
|
||||||
|
|
||||||
今天的这篇文章就给了你一个最小可行方案:
|
今天的这篇文章就给了你一个最小可行方案:
|
||||||
|
|
||||||
> 微信看到好文章 → Messager同步到Obsidian → 提取核心观点 → 链接相关笔记
|
> 微信看到好文章 → Messager同步到Obsidian → 提取核心观点 → 链接相关笔记
|
||||||
|
|
||||||
**把这个流程跑通,你已经超过了90%的人。**
|
**把这个流程跑通,你已经超过了90%的人。**
|
||||||
|
|
||||||
---
|
---
|
||||||
|
|
||||||
## 写在最后
|
## 写在最后
|
||||||
|
|
||||||
从手动复制粘贴到一键同步,看似只是省了几分钟,但实际上,它改变的是你和知识之间的关系。
|
从手动复制粘贴到一键同步,看似只是省了几分钟,但实际上,它改变的是你和知识之间的关系。
|
||||||
|
|
||||||
**以前** :你是信息的被动接收者,收藏了就以为自己会了。
|
**以前** :你是信息的被动接收者,收藏了就以为自己会了。
|
||||||
**现在** :你是知识的主动管理者,每一篇文章都会被审视、提取、链接、内化。
|
**现在** :你是知识的主动管理者,每一篇文章都会被审视、提取、链接、内化。
|
||||||
|
|
||||||
> **收藏是本能,整理是能力,链接是智慧。**
|
> **收藏是本能,整理是能力,链接是智慧。**
|
||||||
|
|
||||||
如果你已经在用 Obsidian,今天就试试这个方案。
|
如果你已经在用 Obsidian,今天就试试这个方案。
|
||||||
如果你还没开始用 Obsidian,那就从今天开始。
|
如果你还没开始用 Obsidian,那就从今天开始。
|
||||||
|
|
||||||
**因为,种一棵树最好的时间是十年前,其次是现在。**
|
**因为,种一棵树最好的时间是十年前,其次是现在。**
|
||||||
|
|
||||||
你的知识库也是。
|
你的知识库也是。
|
||||||
|
|
||||||
继续滑动看下一个
|
继续滑动看下一个
|
||||||
|
|
||||||
猎识者
|
猎识者
|
||||||
|
|
||||||
向上滑动看下一个
|
向上滑动看下一个
|
||||||
|
|
||||||
采集文章
|
采集文章
|
||||||
|
|
||||||
采集图片
|
采集图片
|
||||||
|
|
||||||
采集样式
|
采集样式
|
||||||
|
|
||||||
生成长图
|
生成长图
|
||||||
|
|
||||||
搜公众号
|
搜公众号
|
||||||
|
|
||||||
近似文章
|
近似文章
|
||||||
|
|
||||||
封面图不见了 ’(°ー°〃)
|
封面图不见了 ’(°ー°〃)
|
||||||
143
wiki/concepts/无人机雷达波测流误差分析.md
Executable file
143
wiki/concepts/无人机雷达波测流误差分析.md
Executable file
@@ -0,0 +1,143 @@
|
|||||||
|
---
|
||||||
|
created: 2026-04-29
|
||||||
|
type: concept
|
||||||
|
tags: [无人机, 雷达波, 测流, 误差分析, 多普勒, 水文测量, DJI M400, X-PORT, 增稳云台]
|
||||||
|
---
|
||||||
|
|
||||||
|
# 无人机雷达波测流误差分析
|
||||||
|
|
||||||
|
> 无人机搭载雷达波流速仪(Radar Surface Velocimeter)利用多普勒效应测量水面流速,存在多维度误差源
|
||||||
|
|
||||||
|
## 测量原理
|
||||||
|
|
||||||
|
- 雷达波束照射水面,利用**多普勒频移**计算表层流速(0-5cm 深度)
|
||||||
|
- 需通过**表面流速系数 K**(通常 0.7~0.9)换算为垂线平均流速
|
||||||
|
- 结合断面测量推算流量
|
||||||
|
|
||||||
|
## 实测方案:DJI M400 + X-PORT 增稳云台
|
||||||
|
|
||||||
|
### 硬件配置
|
||||||
|
|
||||||
|
| 组件 | 型号/参数 | 作用 |
|
||||||
|
|------|----------|------|
|
||||||
|
| 无人机平台 | 大疆 M400(Matrice 400) | 重载级行业无人机,RTK 定位,6 旋翼冗余 |
|
||||||
|
| 增稳云台 | X-PORT 三轴增稳云台 | 机械隔离振动 + 三轴主动增稳(俯仰/横滚/航向) |
|
||||||
|
| 载荷 | 雷达波流速仪 | 通过 X-PORT 标准接口挂载 |
|
||||||
|
|
||||||
|
### X-PORT 对平台误差的优化效果
|
||||||
|
|
||||||
|
| 原误差项 | 优化前 | X-PORT 优化后 | 优化原理 |
|
||||||
|
| ----------- | -------------- | ----------- | ---------------------------- |
|
||||||
|
| **悬停姿态角偏差** | 5°~10° 波动 | **<0.5°** | 三轴陀螺仪实时补偿,主动抵消横滚/俯仰 |
|
||||||
|
| **机身振动传递** | 螺旋桨振动直接传导 | **衰减 >90%** | 云台减震球 + 电机主动消振,隔离高频噪声 |
|
||||||
|
| **高度波动** | GPS 高度漂移 ±1~2m | **<0.3m** | RTK 定高 + 云台俯仰轴锁定照射点 |
|
||||||
|
| **波束指向偏差** | 随风向飘移 | **航向锁定** | X-PORT 航向轴(Yaw)主动稳像,保持波束正对水流 |
|
||||||
|
|
||||||
|
### M400 平台自身优势
|
||||||
|
|
||||||
|
| 特性 | 对测流的增益 |
|
||||||
|
| -------------- | ------------------------------------ |
|
||||||
|
| **RTK 厘米级定位** | 平台位移误差从 0.5~2m 降至 **<5cm**,流速叠加误差可忽略 |
|
||||||
|
| **六旋翼冗余** | 单电机失效仍可安全返航,保障洪水期作业安全 |
|
||||||
|
| **IP55 防护等级** | 可在小雨环境作业,扩展了测量窗口 |
|
||||||
|
| **45min 续航** | 支持多断面连续测量,无需频繁换电池 |
|
||||||
|
| **最大载荷 2.7kg** | 可同时挂载雷达流速仪 + 激光测距仪(断面测量) |
|
||||||
|
|
||||||
|
### 综合精度提升对比
|
||||||
|
|
||||||
|
| 工况 | 优化前误差 | M400+X-PORT 优化后 | 改善幅度 |
|
||||||
|
| -------------- | -------- | --------------- | --------- |
|
||||||
|
| 理想条件(无风/平静水面) | 3%~8% | **2%~5%** | ↓ 30%~40% |
|
||||||
|
| 一般条件(2~3级风) | 8%~15% | **4%~8%** | ↓ 40%~50% |
|
||||||
|
| 恶劣条件(4~5级风/小雨) | 15%~30%+ | **8%~15%** | ↓ 40%~50% |
|
||||||
|
|
||||||
|
> 📌 X-PORT 主要解决**平台误差**(第 2 类),对表面系数 K 误差(第 1 类)和风生流误差(第 3 类)无直接改善。
|
||||||
|
|
||||||
|
## 五类误差来源
|
||||||
|
|
||||||
|
### 1. 雷达原理误差
|
||||||
|
|
||||||
|
| 误差项 | 说明 | 影响 |
|
||||||
|
| ----------- | -------------------- | ----------- |
|
||||||
|
| 表面流速系数 K 误差 | 表层→平均流速的换算系数取值不准 | ★★★★★ 最大误差源 |
|
||||||
|
| 布拉格散射偏差 | 无风/平静水面散射信号弱,低流速信号丢失 | ★★★★ |
|
||||||
|
| 波束展宽效应 | 波束张角 10°~30°,斑区内流速不均 | ★★★ |
|
||||||
|
|
||||||
|
### 2. 无人机平台误差
|
||||||
|
|
||||||
|
| 误差项 | 说明 | 影响 |
|
||||||
|
| -------- | --------------------------- | ----- |
|
||||||
|
| 悬停姿态角偏差 | 横滚/俯仰导致入射角偏离,5°偏差≈0.4% 速度误差 | ★★★★★ |
|
||||||
|
| 平台位移(漂流) | GPS 悬停精度 0.5~2m,未补偿时叠加到流速中 | ★★★★★ |
|
||||||
|
| 机身振动 | 螺旋桨振动引入高频噪声,低流速时明显 | ★★★★ |
|
||||||
|
| 高度波动 | 改变照射面积和信号强度 | ★★★ |
|
||||||
|
|
||||||
|
### 3. 环境因素误差
|
||||||
|
|
||||||
|
| 误差项 | 说明 | 影响 |
|
||||||
|
| ------ | --------------------------- | ----- |
|
||||||
|
| 风场影响 | 风生流 + 改变散射强度,3~4级风偏差 5%~15% | ★★★★★ |
|
||||||
|
| 水面波浪 | 波速与流速多普勒信号混叠 | ★★★★ |
|
||||||
|
| 降雨 | 雨滴冲击产生额外散射噪声 | ★★★ |
|
||||||
|
| 漂浮物/水草 | 运动速度≠水流速度 | ★★★ |
|
||||||
|
|
||||||
|
### 4. 几何与标定误差
|
||||||
|
|
||||||
|
| 误差项 | 说明 | 影响 |
|
||||||
|
|--------|------|------|
|
||||||
|
| 入射角标定误差 | 直接影响 cosθ 速度计算 | ★★★★ |
|
||||||
|
| 波束指向偏差 | 未正对水流方向,测到的是投影分量 | ★★★★ |
|
||||||
|
| 断面测量误差 | 流量=流速×断面积,断面不准放大误差 | ★★★★ |
|
||||||
|
|
||||||
|
### 5. 数据处理误差
|
||||||
|
|
||||||
|
| 误差项 | 说明 | 影响 |
|
||||||
|
|--------|------|------|
|
||||||
|
| 流速分布模型选择 | 对数律/指数律与实际不符 | ★★★★ |
|
||||||
|
| 采样时间不足 | 积分时间短导致随机波动大 | ★★★ |
|
||||||
|
|
||||||
|
## 综合精度
|
||||||
|
|
||||||
|
| 工况 | 综合误差 |
|
||||||
|
|------|---------|
|
||||||
|
| 理想条件(无风/平静水面) | 3%~8% |
|
||||||
|
| 一般条件(2~3级风) | 8%~15% |
|
||||||
|
| 恶劣条件(大风/降雨) | 15%~30%+ |
|
||||||
|
|
||||||
|
## 减小误差措施
|
||||||
|
|
||||||
|
### 硬件级
|
||||||
|
|
||||||
|
1. **DJI M400 + X-PORT 增稳云台**(推荐方案)
|
||||||
|
- 三轴主动增稳将姿态角偏差降至 <0.5°
|
||||||
|
- 减震系统隔离 >90% 机身振动
|
||||||
|
- RTK 厘米级定位消除平台位移误差
|
||||||
|
- IP55 防护扩展小雨作业窗口
|
||||||
|
2. **大机型抗风**:无 M400 时选用 ≥2kg 级机型,提高悬停稳定性
|
||||||
|
3. **双载荷同步**:雷达流速仪 + 激光测距仪一次飞行完成流速+断面
|
||||||
|
|
||||||
|
### 软件级
|
||||||
|
|
||||||
|
4. **RTK + IMU 姿态补偿**:实时记录姿态角,软件修正入射角(无云台时必备)
|
||||||
|
5. **多断面多点测量**:减少单点偶然误差
|
||||||
|
6. **ADCP 同步比测**:定期标定表面系数 K
|
||||||
|
|
||||||
|
### 作业策略
|
||||||
|
|
||||||
|
7. **选择测量窗口**:避开大风大雨洪水剧烈变化期
|
||||||
|
8. **固定入射角作业**:预设标准入射角(通常 45°),减少标定误差
|
||||||
|
|
||||||
|
## 相关概念
|
||||||
|
|
||||||
|
- [[无人机 CAAC 执照]]
|
||||||
|
- [[中型多旋翼超视距机长知识点]]
|
||||||
|
- [[视频流技术指南]](M400 图传与载荷控制)
|
||||||
|
|
||||||
|
## 相关实体
|
||||||
|
|
||||||
|
- DJI Matrice 400(重载级行业无人机平台)
|
||||||
|
- DJI X-PORT(三轴增稳云台系统)
|
||||||
|
|
||||||
|
---
|
||||||
|
|
||||||
|
*2026-04-29 研究整理*
|
||||||
@@ -1,6 +1,6 @@
|
|||||||
---
|
---
|
||||||
created: 2026-04-26
|
created: 2026-04-26
|
||||||
updated: 2026-04-28
|
updated: 2026-04-29
|
||||||
---
|
---
|
||||||
|
|
||||||
# 🔥 热缓存 (Hot Cache)
|
# 🔥 热缓存 (Hot Cache)
|
||||||
@@ -9,6 +9,11 @@ updated: 2026-04-28
|
|||||||
|
|
||||||
## 最近更新
|
## 最近更新
|
||||||
|
|
||||||
|
- **2026-04-29 14:00** 无人机雷达波测流误差研究 → M400+X-PORT 方案优化
|
||||||
|
- 五类误差源:原理/平台/环境/几何标定/数据处理
|
||||||
|
- M400+X-PORT:三轴增稳 <0.5°,振动衰减 >90%,RTK 定位 <5cm
|
||||||
|
- 精度改善:一般工况从 8~15% 降至 4~8%,恶劣工况从 15~30% 降至 8~15%
|
||||||
|
- 归档:concepts/无人机雷达波测流误差分析
|
||||||
- **2026-04-28 00:00** 知识库按 PARA 方法重组
|
- **2026-04-28 00:00** 知识库按 PARA 方法重组
|
||||||
- Projects: 软考高项冲刺、无人机CAAC考证
|
- Projects: 软考高项冲刺、无人机CAAC考证
|
||||||
- Areas: 第二大脑、AI编程工具(20篇研究)
|
- Areas: 第二大脑、AI编程工具(20篇研究)
|
||||||
|
|||||||
@@ -32,6 +32,7 @@ updated: 2026-04-28
|
|||||||
| ↳ [[PMP 关键名词]] | PMP/PMBOK 核心概念速查 | |
|
| ↳ [[PMP 关键名词]] | PMP/PMBOK 核心概念速查 | |
|
||||||
| ↳ 10大知识领域 | 整合/范围/进度/成本/质量/资源/沟通/风险/采购/干系人 | |
|
| ↳ 10大知识领域 | 整合/范围/进度/成本/质量/资源/沟通/风险/采购/干系人 | |
|
||||||
| [[无人机CAAC执照]] | 中型多旋翼超视距机长培训 | 🔴 活跃 |
|
| [[无人机CAAC执照]] | 中型多旋翼超视距机长培训 | 🔴 活跃 |
|
||||||
|
| ↳ [[无人机雷达波测流误差分析]] | M400+X-PORT增稳方案,五类误差源+精度对比 |
|
||||||
|
|
||||||
### 🟡 Areas(领域)- 持续关注的责任领域
|
### 🟡 Areas(领域)- 持续关注的责任领域
|
||||||
|
|
||||||
|
|||||||
Reference in New Issue
Block a user